四维超正方体
在几何学中,四维超正方体或正八胞体,是一种四维的超正方体(英语:hypercube)是立方体的四维类比,有8个立方体胞。四维超正方体之于立方体,就如立方体之于正方形。它是四维欧式空间中6个四维凸正多胞体之一。
| 超正方体 (8胞体) 4-超方形 | |
|---|---|
 施莱格尔图 | |
| 类型 | 四维凸正多胞体 |
| 家族 | 超方形 |
| 维度 | 4 |
| 对偶多胞形 | 正十六胞体 |
| 类比 | 正方体 |
| 识别 | |
| 鲍尔斯缩写 | tes |
| 数学表示法 | |
| 考克斯特符号 | |
| 施莱夫利符号 | {4,3,3} {4,3}x{} {4}x{4} {4}x{}x{} {}x{}x{}x{} |
| 性质 | |
| 胞 | 8 (4.4.4) |
| 面 | 24 {4} |
| 边 | 32 |
| 顶点 | 16 |
| 组成与布局 | |
| 顶点图 | (3.3.3) |
| 对称性 | |
| 对称群 | B4, [3,3,4] |
| 特性 | |
| 凸集 | |
超正方体是一个有无穷多个成员的凸正多胞形家族的四维成员,这个家族被称为“超方形”(或称立方形、正测形),这个家族的成员与施莱夫利符号{4,3,3,……,3,3},它们都具有类似正方形和立方体的性质,如二胞角都为90°等。
“超正方体”和“超立方体”(Hypercube)这个名称在一般的场合中特指四维的这个超正方体,不过在数学上,“超正方体”这个词可以指n维(n>3)的任意一个超方形,因此把它和n维的其他超方形放在一起讨论时,要加“四维”以示区别。
几何性质
{kind=link}
在四维欧几里得空间的标准四维方体是点(±1, ±1, ±1, ±1)的凸包。它包含了点:
四维方体由八个超平面(xi = ±1)包围。两两非平行超平面相交,共形成四维方体的24个正方形面。每条棱有3个立方体和3个正方形相交。在每一顶点有4个立方体、6个正方形和4条棱相交。四维方体共有8个立方体、24个正方形、32条棱和16个顶点。边长为a的四维超正方体超体积是a4,表体积是8a3。
若一个四维超立方体的棱长为1,则其外接超球半径为1,外中交超球(经过超立方体各棱中点的三维超球)半径为 ,内中交超球(经过超立方体各面中心的三维超球)半径为 ,内切超球半径为 。事实上,对于任意一个棱长为a的n维超方形,其自身中心到任意一个k维元素的中心的距离为 。
四维方体的每一顶点与4条棱相邻,所以四维方体的顶点图是正四面体。所以四维方体的施莱夫利符号是{4,3,3},前面两个数字{4,3}代表其维面为立方体、后面两个数字{3,3}代表其顶点图为正四面体。其对偶多胞体是正十六胞体,施莱夫利符号是{3,3,4}。对偶多胞体维面与顶点图交换,正十六胞体的维面变为正四面体、顶点图变为立方体。
对称群构造
作为一个超方形,超立方体可被识别为不同对称群的多胞体:首先,它是四维的超方形——一个凸正多胞体——四维超立方体,对应施莱夫利符号{4,3,3},考克斯特符号为 ,对应考克斯特BC4平面(即超方形—正轴形对应的考克斯特平面),具有超正八面体对称性(又叫正十六胞体对称性),阶为384。同时,它也可被看作是立方体的四维棱柱,对应施莱夫利符号{4,3}×{},考克斯特符号 ,这个对称群的阶只有96。并且,它还是四维以上高维才有的两个二维以上多胞形的欧拉乘积——四维柱体柱的一个,即4-4柱体柱,是两个正方形的乘积,对应施莱夫利符号{4}×{4},考克斯特符号为 ,群阶64。它还是正四棱柱棱柱{4}×{}×{}, ,群阶32。它还是线段棱柱棱柱棱柱{}×{}×{}×{}, ,群阶16。
投影
二维投影
{kind=link}
超正方体的构造方法可以通过以下方式来想象:
- 零维:因为任何一点放大都是一条直线,所以任何一点都是属于一维空间,而不属于零维空间。
- 一维:两个点A和B可以被连接起来,我们就得到一个新的线段AB。
- 从一维到二维:两个平行的线段AB和CD可以被连接起来,我们就得到了一个正方形,以顶点为标记记作正方形ABCD。
- 从二维到三维:两个平行的正方形ABCD和EFGH可以被连接起来,我们就得到了一个立方体,以顶点标记为立方体ABCDEFGH。
- 从三维到四维:两个平行的立方体ABCDEFGH和IJKLMNOP可以被连接起来,我们于是就得到了一个超正方体,以顶点标记为超正方体ABCDEFGHIJKLMNOP。
四维方体的结构不易想象,但可以投射至3维或2维空间。在我们将其投影到二维空间中后,把顶点位置调整,可以了解更多。如此获得的图像,不再反映四维方体空间构造,而是反映顶点间的联系。以下给出一些例子。
{kind=link}
{kind=link}
{kind=link}
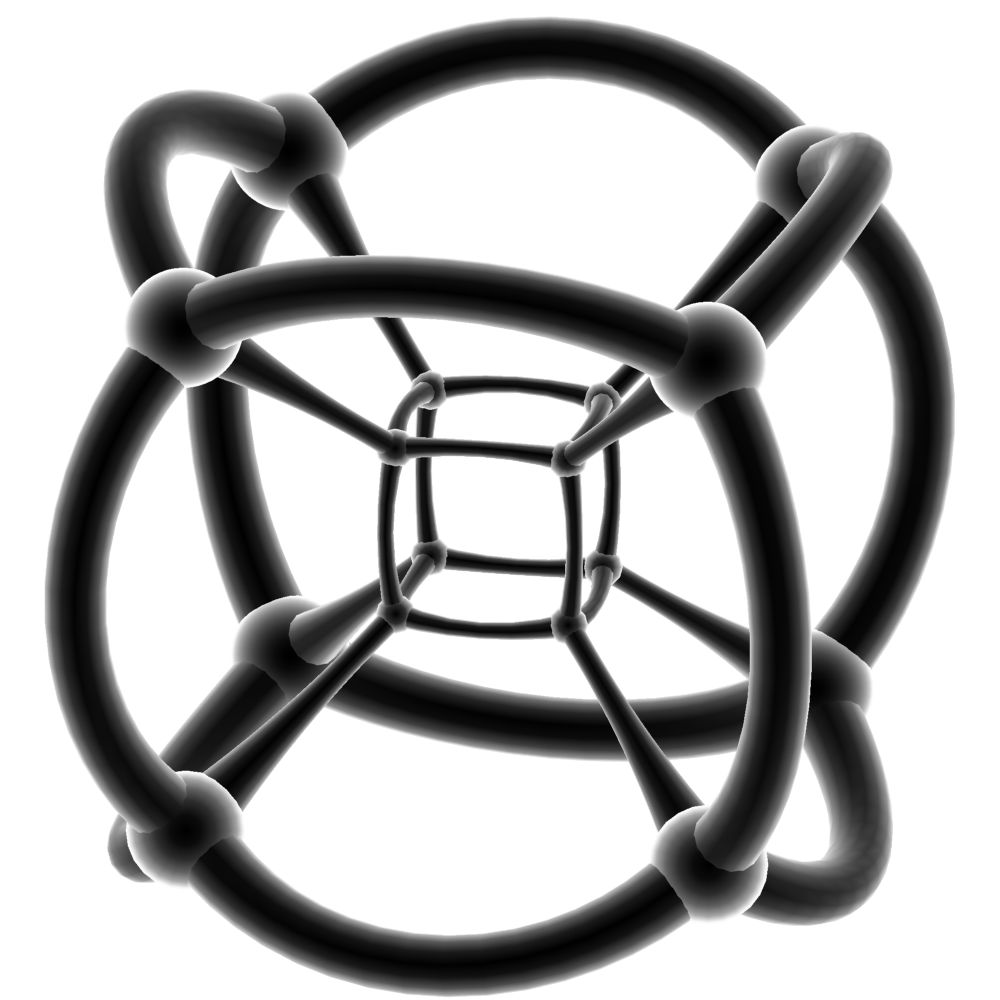
第一幅图显示四维方体本质上从结合2个立方体,连结对应顶点得来。第二幅图反映出四维方体每条边等长,也可以看出立方体如何互相连结。第三幅图按著每一顶点由最底一顶点出发沿着棱走的长度排列。如果我们是要将超正方体用作在并行计算中连接不同处理器网络拓扑基础,则这些图像会非常有用。在超正方体中任意两个顶点之间之间至多有4中不同的路程,并且这里有许多路径是等同的。
超正方体还是一个二分图,就像正方形和立方体一样。
三维投影
{kind=link}
|
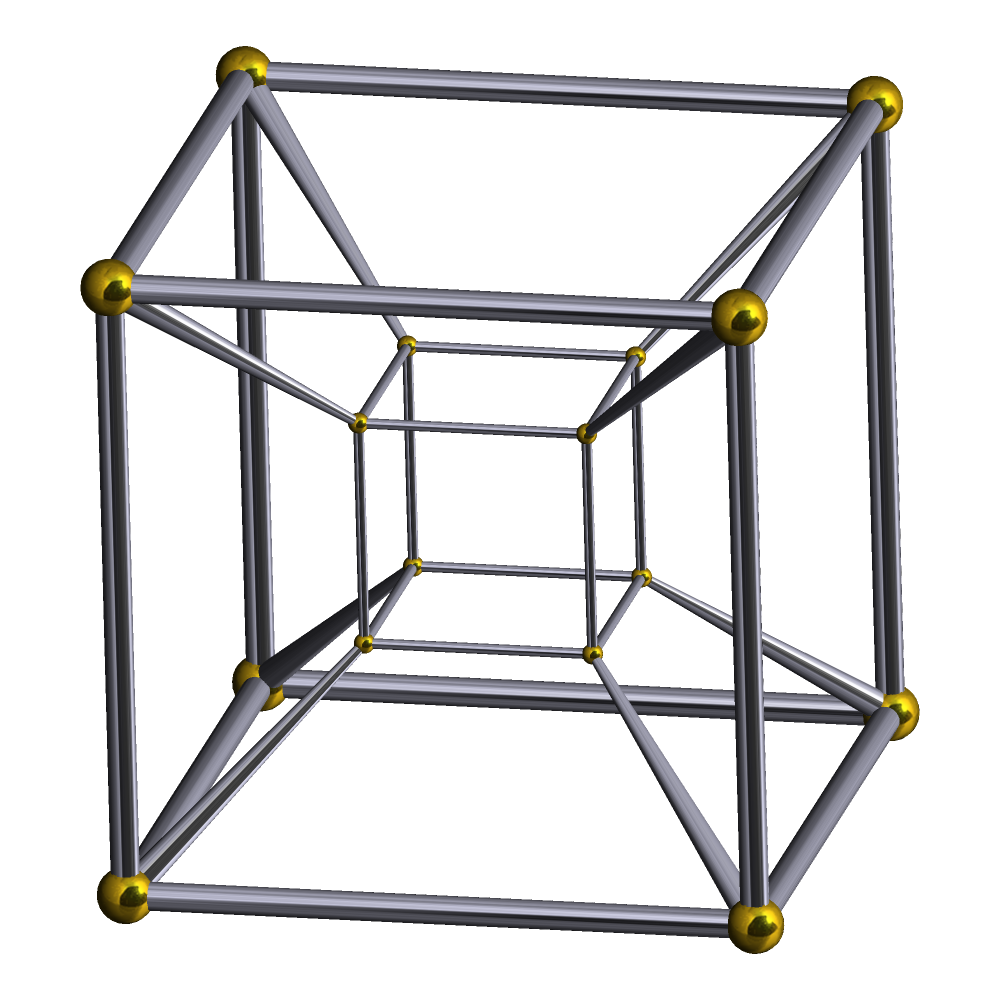
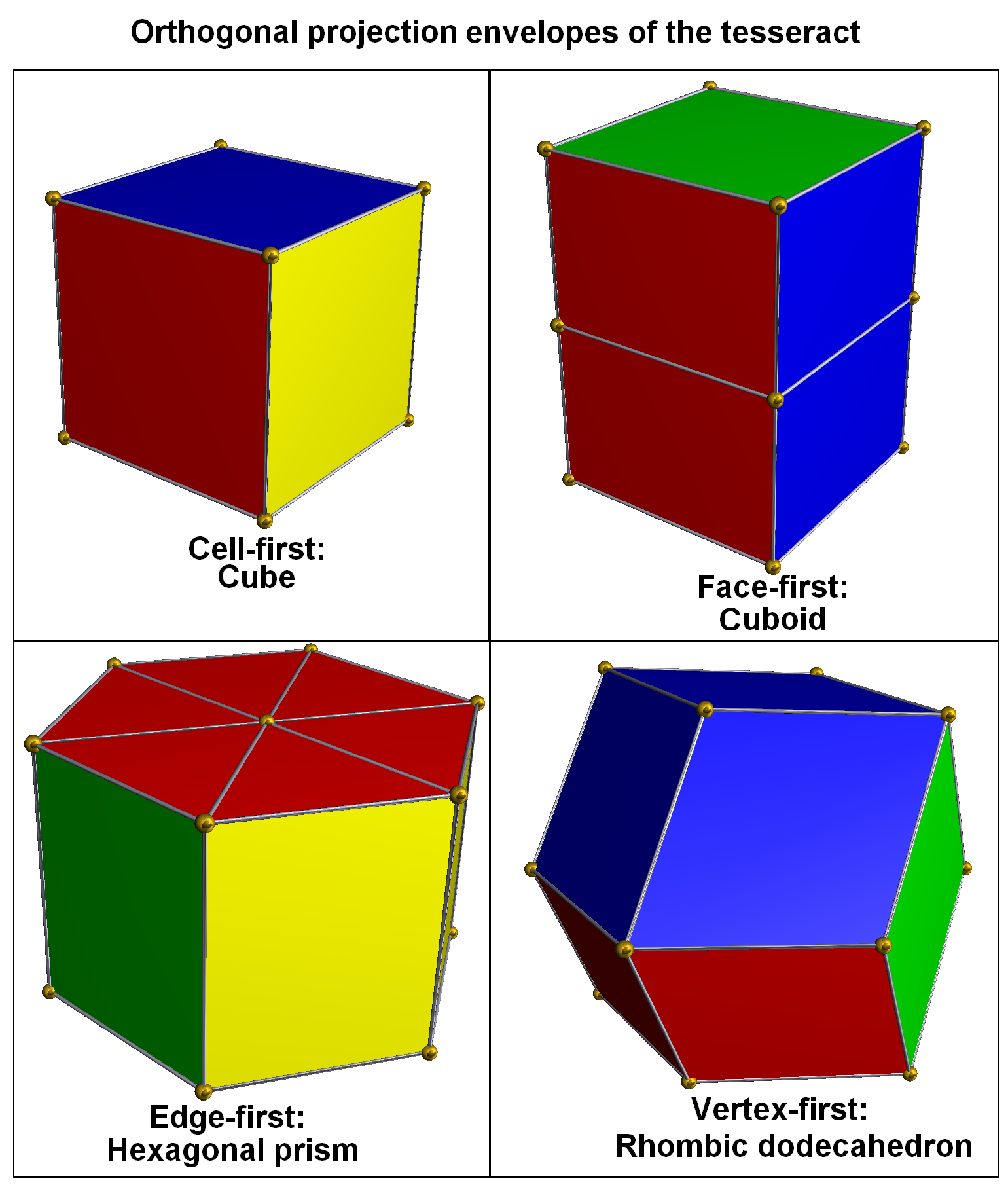
超正方体到三维空间的正对胞的平行投影有一个立方体凸包。最近端的和最远端的胞被投影成了立方体凸包本身,而剩余6个立方体胞则被投影成了立方体的6个正方形面。(因为它们平行于投影线) 超正方体到三维空间的正对面的平行投影有一个长方体(正四棱柱)凸包。2对胞被投影成了长方体凸包的上下两半,而剩余4个胞则投影成了正四棱柱凸包的侧面。 超正方体到三维空间的正对棱的平行投影有一个正六棱柱形的凸包。6个胞被投影成了菱形棱柱,它们在正六棱柱凸包中的排列方式就如同立方体正对顶点的平行投影中正方形面投影成的菱形在六边形凸包中的排列方式。剩余的2个胞被投影成了正六棱柱的两个底面。 超正方体到三维空间的正对顶点的平行投影有一个菱形十二面体凸包,事实上,我们正好有两种方法能将菱形十二面体分割成4个全等的平行六面体,因此菱形十二面体中共计有8个全等的平行六面体。超正方体在这种投影下胞的投影就正好是这8个平行六面体。这个投影的体积是超正方体所有投影中最大的。 |
{kind=link}
可视化
{kind=link}
|
超正方体能够被展开成三维空间中的一个由8个立方体组成的展开图,就像立方体能被展开成二维空间中的一个由6个正方形组成的展开图一样。(观看动画)超正方体有261种不同的展开图[1]我们可以通过将展开图与对偶树(是一种在其补图中有完美匹配的树 (图论))相匹配来计算其展开图的个数。 |
超正方体立体的三维投影(平行视角 ) |
{kind=link}
{kind=link}
{kind=link}
透视投影
| 正八胞体绕着一个从左前到右后,从上到下切过图形的平面进行单旋转时的透视投影。 |
正八胞体绕着两个在四维空间中互相正交的平面进行双旋转时的透视投影。 |
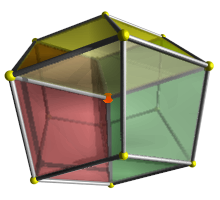
超正方体的透视投影,背面的胞已被隐藏。红色的顶点是在四维空间中最近的顶点,有4个立方体胞在此相交。 |
{kind=link}
{kind=link}
{kind=link}
|
正四面体是超正方体中心投影的凸包。8个立方体胞中的4个是可见的。第16个顶点被投影成了无穷远点,并且与之相连的棱和胞都被隐藏了。 |
球极投影 (棱首先被投影上了3-球) |
{kind=link}
{kind=link}
二维线架投影
| 考克斯特平面 | B4 | B3 / D4 / A2 | B2 / D3 |
|---|---|---|---|
| 图像 | |||
| 二面体群 | [8] | [6] | [4] |
| 考克斯特平面 | (对角线投向中心) | F4 | A3 |
| 图像 | |||
| 二面体群 | [2] | [12/3] | [4] |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
相关槪念
外部链接
- 埃里克·韦斯坦因. Tesseract. MathWorld.
- Olshevsky, George, Tesseract at Glossary for Hyperspace.
- Der 8-Zeller (8-cell)(页面存档备份,存于互联网档案馆) Marco Möller's Regular polytopes in R4 (German)
- WikiChoron: Tesseract
- HyperSolids is an open source program for the Apple Macintosh (Mac OS X and higher) which generates the five regular solids of three-dimensional space and the six regular hypersolids of four-dimensional space.
- Hypercube 98(页面存档备份,存于互联网档案馆) A Windows program that displays animated hypercubes, by Rudy Rucker
- ken perlin's home page(页面存档备份,存于互联网档案馆) A way to visualize hypercubes, by Ken Perlin
- Some Notes on the Fourth Dimension(页面存档备份,存于互联网档案馆) includes very good animated tutorials on several different aspects of the tesseract, by Davide P. Cervone(页面存档备份,存于互联网档案馆)
- Tesseract animation with hidden volume elimination(页面存档备份,存于互联网档案馆)
- A Study of Dimensions by Bill Price
- Regular convex four-dimensional polytopes by David Fontaine
| 四维正多胞体 | |||||
|---|---|---|---|---|---|
| 正五胞体 | 超立方体 | 正十六胞体 | 正二十四胞体 | 正一百二十胞体 | 正六百胞体 |
| {3,3,3} | {4,3,3} | {3,3,4} | {3,4,3} | {5,3,3} | {3,3,5} |
参考资料
- ^ Unfolding an 8-cell. [2013-08-31]. (原始内容存档于2018-07-25).