这篇文章阐述最小作用量原理的
历史 。关于实用方法,请参阅条目
作用量 。
在物理学 里, 最小作用量原理 (英语:least action principle ),或更精确地,平稳作用量原理 (英语:stationary action principle ),是一种变分原理 ,当应用于一个机械系统 的作用量 时,可以得到此机械系统的运动方程 。这原理的研究引导出经典力学 的拉格朗日表述 和哈密顿表述 的发展。卡尔·雅可比 特称最小作用量原理为分析力学 之母[1]
在现代物理学里,这原理非常重要,在相对论 、量子力学 、量子场论 里,都有广泛的用途。在现代数学里,这原理是莫尔斯理论 的研究焦点。本篇文章主要是在阐述最小作用量原理的历史发展。关于数学描述、推导和实用方法,请参阅条目作用量 。最小作用量原理有很多种例子,主要的例子是莫佩尔蒂原理 (Maupertuis' principle )和哈密顿原理 。
在最小作用量原理之前,有很多类似的点子出现于测量学 和光学 。古埃及 的拉绳测量者 [2] 托勒密 在他的著作《地理学指南》(Geographia 古希腊 数学家欧几里得 在《反射光学》(Catoptrica 反射 路径的入射角 等于反射角 。稍后,亚历山大的希罗 证明这路径的长度是最短的[3]
费马的表述
光线从点Q传播至点O时,会被半圆形或混合形镜子反射 ,最终抵达点P。
1662年,皮埃尔·德·费马 提出费马原理 ,又称为“最短时间原理”:光线 移动的路径是需时最少的路径[4]
费马原理更正确的版本应是“平稳时间原理”。对于某些状况,光线移动的路径所需的时间可能不是最小值,而是最大值,或甚至是拐值 。例如,对于平面镜,任意两点的反射路径光程是最小值;对于半椭圆形镜子,其两个焦点的光线反射路径不是唯一的,光程都一样,是最大值,也是最小值;对于半圆形镜子,其两个端点Q、P的反射 路径光程是最大值;又如最右图所示,对于由四分之一圆形镜与平面镜组合而成的镜子,同样这两个点Q、P的反射 路径的光程是拐值。[5]
假设,介质1、介质2的折射率分别为
n
1
{\displaystyle n_{1}}
n
2
{\displaystyle n_{2}}
n
1
sin
θ
1
=
n
2
sin
θ
2
{\displaystyle n_{1}\sin \theta _{1}=n_{2}\sin \theta _{2}}
其中,
θ
1
{\displaystyle \theta _{1}}
θ
2
{\displaystyle \theta _{2}}
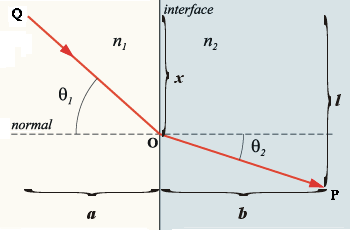
光线从介质1的点Q,在点O移动进入介质2,发生折射,最后抵达介质2的点P
从费马原理,可以推导出斯涅尔定律 。通过设定光程对于时间的导数为零,可以找到“平稳路径”,这就是光线移动的路径。光线在介质1与介质2的速度 分别为
v
1
=
c
/
n
1
{\displaystyle v_{1}=c/n_{1}}
v
2
=
c
/
n
2
{\displaystyle v_{2}=c/n_{2}}
其中,
c
{\displaystyle c}
真空 光速。
由于介质会减缓光线的速度,折射率
n
1
{\displaystyle n_{1}}
n
2
{\displaystyle n_{2}}
1
{\displaystyle 1}
如右图所示,从点Q到点P的移动时间
T
{\displaystyle T}
T
=
x
2
+
a
2
v
1
+
b
2
+
(
l
−
x
)
2
v
2
{\displaystyle T={\frac {\sqrt {x^{2}+a^{2}}}{v_{1}}}+{\frac {\sqrt {b^{2}+(l-x)^{2}}}{v_{2}}}}
根据费马原理,光线移动的路径是所需时间为极值的路径,取移动时间
T
{\displaystyle T}
x
{\displaystyle x}
d
T
d
x
=
x
v
1
x
2
+
a
2
+
−
(
l
−
x
)
v
2
(
l
−
x
)
2
+
b
2
=
0
{\displaystyle {\frac {dT}{dx}}={\frac {x}{v_{1}{\sqrt {x^{2}+a^{2}}}}}+{\frac {-(l-x)}{v_{2}{\sqrt {(l-x)^{2}+b^{2}}}}}=0}
由图中的边角关系,可以得到移动速度与折射角的关系式:
d
T
d
x
=
sin
θ
1
v
1
−
sin
θ
2
v
2
=
0
{\displaystyle {\frac {dT}{dx}}={\frac {\sin \theta _{1}}{v_{1}}}-{\frac {\sin \theta _{2}}{v_{2}}}=0}
将移动速度与折射率的关系式代入,就会得到斯涅尔定律:
n
1
sin
θ
1
=
n
2
sin
θ
2
{\displaystyle n_{1}\sin \theta _{1}=n_{2}\sin \theta _{2}}
费马原理引发了极大的争议。假若介质的密度越小,光线的移动速度越快,则费马原理是正确的;但是,艾萨克·牛顿 和勒内·笛卡儿 都认为介质的密度越大,光线的移动速度就越快。1802年,托马斯·杨 做实验发现,当光波从较低密度介质移动进入较高密度介质之后,光波的波长会变短,他因此推论光波的运动速度会降低。[5]
莫佩尔蒂的表述
最小作用量原理应用于作用量的最初始表述,时常归功于皮埃尔·莫佩尔蒂 。于1744年和1746年,他写出一些关于这方面的论文[6] [7] 莱昂哈德·欧拉 在他的1744年论文里就已谈到这原理[8] 戈特弗里德·莱布尼茨 就已经发现这原理了[9]
莫佩尔蒂发表的最小作用量原理阐明,对于所有的自然现象,作用量 趋向于最小值。他定义一个运动中的物体的作用量为
A
{\displaystyle A}
m
{\displaystyle m}
v
{\displaystyle v}
s
{\displaystyle s}
[10]
A
=
m
v
s
{\displaystyle A=mvs}
莫佩尔蒂又从宇宙论 的观点来论述,最小作用量好像是一种经济原理。在经济学 里,大概就是精省资源 的意思。这论述的瑕疵是,并没有任何理由,能够解释,为什么作用量趋向最小值,而不是最大值。假若,我们解释最小作用量为大自然的精省资源,那么,我们又怎样解释最大作用量呢?
折射理论 于1744年,在巴黎科学院发表的一篇论文《几种以前互不相容的自然定律的合一论》(Accord de plusieurs lois naturelles qui avaient paru jusqu'ici incompatibles 折射 的路径,从一种介质到另一种介质,是作用量的最小值。按照这论点,如前图,假设光线从折射率 为
n
1
{\displaystyle n_{1}}
n
2
{\displaystyle n_{2}}
A
=
m
(
v
1
x
2
+
a
2
+
v
2
b
2
+
(
l
−
x
)
2
)
{\displaystyle A=m\left(v_{1}{\sqrt {x^{2}+a^{2}}}+v_{2}{\sqrt {b^{2}+(l-x)^{2}}}\right)}
其中,
m
{\displaystyle m}
取作用量对于变数
x
{\displaystyle x}
v
1
sin
θ
1
=
v
2
sin
θ
2
{\displaystyle v_{1}\sin \theta _{1}=v_{2}\sin \theta _{2}}
请注意,这结果与牛顿的光粒子理论相符合;但是,与费马得到的结果南辕北辙,大不相同。
非弹性碰撞 1747年,莫佩尔蒂在伯林科学院 (Academy of Berlin )发表了论文《运动与静止定律》(Loix du mouvement et du repos 碰撞 分为两种,弹性碰撞 与非弹性碰撞 。弹性碰撞遵守动量守恒 和能量守恒 ;非弹性碰撞只遵守动量守恒。莫佩尔蒂可以将最小作用量原理应用于弹性碰撞与非弹性碰撞,正确地计算出碰撞后的物体的速度。
思考一个一维非弹性碰撞,假设两个质量分别为
m
1
{\displaystyle m_{1}}
m
2
{\displaystyle m_{2}}
1 和物体O2 ,分别以初始速度
v
1
{\displaystyle v_{1}}
v
2
{\displaystyle v_{2}}
v
1
>
v
2
{\displaystyle v_{1}>v_{2}}
1 紧追着物体O2 。当两物体发生非弹性碰撞后,结合成为物体O3 ,以终结速度
v
3
{\displaystyle v_{3}}
3 的参考系观察,物体O1 和物体O2 的速度分别为
v
1
−
v
3
{\displaystyle v_{1}-v_{3}}
v
2
−
v
3
{\displaystyle v_{2}-v_{3}}
A
=
m
1
(
v
1
−
v
3
)
2
t
+
m
2
(
v
2
−
v
3
)
2
t
{\displaystyle A=m_{1}(v_{1}-v_{3})^{2}t+m_{2}(v_{2}-v_{3})^{2}t}
其中,
t
{\displaystyle t}
取作用量对于变数
v
3
{\displaystyle v_{3}}
m
1
(
v
1
−
v
3
)
+
m
2
(
v
2
−
v
3
)
=
0
{\displaystyle m_{1}(v_{1}-v_{3})+m_{2}(v_{2}-v_{3})=0}
所以,最终速度为
v
3
=
m
1
v
1
+
m
2
v
2
m
1
+
m
2
{\displaystyle v_{3}={\frac {m_{1}v_{1}+m_{2}v_{2}}{m_{1}+m_{2}}}}
请注意,按照这种设定参考系的方法,前面折射问题的光折射作用量应该是
A
=
m
(
v
1
−
v
2
)
x
2
+
a
2
{\displaystyle A=m(v_{1}-v_{2}){\sqrt {x^{2}+a^{2}}}}
还有,前面光折射作用量的距离参数是任意值,但是,非弹性碰撞作用量的碰撞前距离参数与碰撞后距离参数被设定为相等。
由于这些不一致之处,促使恩斯特·马赫 严厉批评,莫佩尔蒂的最小作用量原理只是一个模糊不清的概念,勉强地被用来解释各种不同的物理现象[11]
欧拉的表述
1744年,莱昂哈德·欧拉 在论文《寻找具有极大值或极小值性质的曲线,等周问题的最广义解答》(Methodus inveniendi lineas curvas maximi minimive proprietate gaudentes, sive solutio problematis isoperimetrici lattissimo sensu accepti [12]
设定一个质量为
M
{\displaystyle M}
v
{\displaystyle v}
d
s
{\displaystyle ds}
M
v
{\displaystyle Mv}
d
s
{\displaystyle \mathrm {d} s}
M
v
d
s
{\displaystyle Mv\,\mathrm {d} s}
d
s
{\displaystyle \mathrm {d} s}
∫
M
v
d
s
{\displaystyle \int Mv\mathrm {d} s}
∫
v
d
s
{\displaystyle \int v\,\mathrm {d} s}
如同欧拉所写,
∫
M
v
d
s
{\displaystyle \int Mv\,\mathrm {d} s}
简略作用量
∫
p
⋅
d
q
{\displaystyle \int \mathbf {p} \cdot \,\mathrm {d} \mathbf {q} }
p
{\displaystyle \mathbf {p} }
广义动量 ,
q
{\displaystyle \mathbf {q} }
广义坐标 。因此,在同一年,稍微比莫佩尔蒂晚一点,欧拉独立地发表了,与莫佩尔蒂的理论等同的,关于变分原理 的理论。欧拉并没有争夺优先荣誉。
直线运动 假设没有任何作用力施加于这粒子,则这粒子以均匀速度移动:
A
=
∫
M
v
d
s
=
M
v
s
{\displaystyle A=\int Mv\,\mathrm {d} s=Mvs}
只有在轨道长度
s
{\displaystyle s}
抛物线运动 假设这移动于二维空间的粒子感受到均匀重力
F
=
M
g
y
^
{\displaystyle \mathbf {F} =Mg{\hat {\mathbf {y} }}}
活力定律 (principle of vis viva ),
1
2
M
v
2
=
1
2
M
v
0
2
+
M
g
y
{\displaystyle {\frac {1}{2}}Mv^{2}={\frac {1}{2}}Mv_{0}^{2}+Mgy}
其中,
v
{\displaystyle v}
v
0
{\displaystyle v_{0}}
y
{\displaystyle y}
g
{\displaystyle g}
将这方程代入作用量:
A
=
∫
M
v
d
s
=
∫
M
v
0
2
+
2
g
y
d
s
=
∫
M
v
0
2
+
2
g
y
1
+
(
d
x
d
y
)
2
d
y
{\displaystyle A=\int Mv\,\mathrm {d} s=\int M{\sqrt {v_{0}^{2}+2gy}}\,\mathrm {d} s=\int M{\sqrt {v_{0}^{2}+2gy}}\,{\sqrt {1+\left({\frac {dx}{dy}}\right)^{2}}}\ dy}
令
δ
A
=
0
{\displaystyle \delta A=0}
变分法 ,可以得到欧拉-拉格朗日方程 :
v
0
2
+
2
g
y
(
d
x
d
y
)
1
+
(
d
x
d
y
)
2
=
k
1
{\displaystyle {\cfrac {{\sqrt {v_{0}^{2}+2gy}}\left({\frac {dx}{dy}}\right)}{\sqrt {1+\left({\frac {dx}{dy}}\right)^{2}}}}=k_{1}}
其中,
k
1
{\displaystyle k_{1}}
重新编排,可以得到
d
x
d
y
=
k
1
v
0
2
+
2
g
y
−
k
1
2
{\displaystyle {\frac {dx}{dy}}={\cfrac {k_{1}}{\sqrt {v_{0}^{2}+2gy-k_{1}^{2}}}}}
将这方程积分,
x
=
k
1
g
v
0
2
+
2
g
y
−
k
1
2
+
k
2
{\displaystyle x={\frac {k_{1}}{g}}{\sqrt {v_{0}^{2}+2gy-k_{1}^{2}}}+k_{2}}
其中,
k
2
{\displaystyle k_{2}}
假设粒子的初始位置为
(
0
,
0
)
{\displaystyle (0,0)}
(
0
,
v
0
)
{\displaystyle (0,v_{0})}
k
1
=
v
0
{\displaystyle k_{1}=v_{0}}
k
2
=
0
{\displaystyle k_{2}=0}
x
=
2
v
0
2
y
g
{\displaystyle x={\sqrt {\frac {2v_{0}^{2}y}{g}}}}
重新编排,可以看出这是抛物线 方程:
y
=
g
2
v
0
2
x
2
{\displaystyle y={\frac {g}{2v_{0}^{2}}}\ x^{2}}
欧拉又将这结果推广至一群粒子。他认为最小作用原理所以正确,是因为粒子的惯性试着阻抗任何关于状态的改变,自由粒子会选择遵循影响最小的作用力[4]
拉格朗日的表述
约瑟夫·拉格朗日 对于变分法贡献良多。拉格朗日在论文《分析力学》(Mecanique Analytique 能量守恒定律 理论推导出欧拉表述的最小作用量原理是正确的[4]
E
=
T
+
V
{\displaystyle E=T+V}
其中,
E
{\displaystyle E}
能量 ,
T
{\displaystyle T}
动能 ,
V
{\displaystyle V}
势能 。
势能的变分为
δ
V
=
∇
V
⋅
δ
r
{\displaystyle \delta V=\nabla V\cdot \delta \mathbf {r} }
其中,
r
{\displaystyle \mathbf {r} }
δ
r
{\displaystyle \delta \mathbf {r} }
虚位移 。
粒子感受到的作用力
F
{\displaystyle \mathbf {F} }
梯度 。将牛顿第二定律 带入方程,
δ
V
=
−
F
⋅
δ
r
=
−
M
r
¨
⋅
δ
r
=
−
M
d
d
t
(
r
˙
⋅
δ
r
)
+
M
r
˙
⋅
d
d
t
(
δ
r
)
{\displaystyle \delta V=-\mathbf {F} \cdot \delta \mathbf {r} =-M{\ddot {\mathbf {r} }}\cdot \delta \mathbf {r} =-M{\frac {\mathrm {d} }{\mathrm {d} t}}({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )+M{\dot {\mathbf {r} }}\cdot {\frac {\mathrm {d} }{\mathrm {d} t}}(\delta \mathbf {r} )}
微分运算可以和变分运算对易:
r
˙
⋅
d
d
t
(
δ
r
)
=
r
˙
⋅
δ
r
˙
=
v
⋅
δ
v
=
1
2
δ
v
2
{\displaystyle {\dot {\mathbf {r} }}\cdot {\frac {\mathrm {d} }{\mathrm {d} t}}(\delta \mathbf {r} )={\dot {\mathbf {r} }}\cdot \delta {\dot {\mathbf {r} }}=\mathbf {v} \cdot \delta \mathbf {v} ={\frac {1}{2}}\delta v^{2}}
其中,
v
{\displaystyle \mathbf {v} }
所以,势能的变分为
δ
V
=
−
M
d
d
t
(
r
˙
⋅
δ
r
)
+
M
2
δ
v
2
{\displaystyle \delta V=-M{\frac {\mathrm {d} }{\mathrm {d} t}}({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )+{\frac {M}{2}}\delta v^{2}}
动能的变分为
δ
T
=
M
2
δ
v
2
{\displaystyle \delta T={\frac {M}{2}}\delta v^{2}}
总能量的变分为:
δ
E
=
δ
T
+
δ
V
=
M
δ
v
2
−
M
d
d
t
(
r
˙
⋅
δ
r
)
{\displaystyle \delta E=\delta T+\delta V=M\delta v^{2}-M{\frac {\mathrm {d} }{\mathrm {d} t}}({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )}
总能量的积分的变分为
δ
∫
E
d
t
=
∫
M
δ
(
v
2
)
d
t
−
∫
M
d
d
t
(
r
˙
⋅
δ
r
)
d
t
=
δ
∫
M
v
2
d
t
−
M
∫
d
(
r
˙
⋅
δ
r
)
=
δ
∫
M
v
d
s
−
M
∫
d
(
r
˙
⋅
δ
r
)
{\displaystyle \delta \int E\ \mathrm {d} t=\int M\delta (v^{2})\ \mathrm {d} t-\int M{\frac {\mathrm {d} }{\mathrm {d} t}}({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )\ \mathrm {d} t=\delta \int Mv^{2}\ \mathrm {d} t-M\int \mathrm {d} ({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )=\delta \int Mv\ \mathrm {d} s-M\int \mathrm {d} ({\dot {\mathbf {r} }}\cdot \delta \mathbf {r} )}
其中,
d
s
{\displaystyle \mathrm {d} s}
设定路径的两个端点为固定不变,能量也守恒不变,则粒子移动的路径的作用量是稳定值:
δ
A
=
δ
∫
M
v
d
s
=
0
{\displaystyle \delta A=\delta \int Mv\ \mathrm {d} s=0}
拉格朗日最小作用量原理 推广至位形空间 ,拉格朗日最小作用量原理阐明,
δ
A
=
δ
∫
∑
i
p
i
d
q
i
=
0
{\displaystyle \delta A=\delta \int \sum _{i}p_{i}\mathrm {d} q_{i}=0}
其中,
p
i
{\displaystyle p_{i}}
广义动量 ,
q
i
{\displaystyle q_{i}}
广义坐标 。
欧拉-拉格朗日最小作用量原理 拉格朗日又注意到在作用量的方程
A
=
∫
M
v
d
s
{\displaystyle A=\int Mv\,\mathrm {d} s}
d
s
=
v
d
t
{\displaystyle \mathrm {d} s=v\,\mathrm {d} t}
将这方程代入作用量,可以看见被积分项目是动能项目:
A
=
∫
M
v
2
d
t
=
∫
2
T
d
t
{\displaystyle A=\int Mv^{2}\,\mathrm {d} t=\int 2T\,\mathrm {d} t}
因此,作用量也可以表达为(忽略常数乘法因子)
A
=
∫
t
i
t
f
2
T
d
t
{\displaystyle A=\int _{t_{i}}^{t_{f}}2T\,\mathrm {d} t}
欧拉-拉格朗日最小作用量原理表明,描述粒子运动的作用量必定是稳定值[13]
δ
A
=
δ
∫
t
i
t
f
2
T
d
t
=
0
{\displaystyle \delta A=\delta \int _{t_{i}}^{t_{f}}2T\,\mathrm {d} t=0}
请特别注意,这方程看起来简易精致,然而,隐藏在使用方面有很大的问题。欧拉的作用量积分于路径;而这作用量积分于时间。变分法要求积分域两端固定不变。虽然路径两端是固定值,转换至时间,为了要满足能量守恒,时间间隔的两端可能不是固定值。亚可比因此批评拉格朗日的方法有瑕疵[13] 奥凌迪·若立格 (Olinde Rodrigues )想出新点子,将这时间作用量的变分详细计算出来[1]
表观目的论
微分运动方程数学等价于其对应的积分运动方程,这具有很重要的哲学 意义。微分方程描述局部于空间的一点或单独时间的片刻。举例而言,牛顿第二定律
F
=
m
a
{\displaystyle \mathbf {F} =m\mathbf {a} }
F
{\displaystyle \mathbf {F} }
m
{\displaystyle m}
a
{\displaystyle \mathbf {a} }
设定一个移动粒子开始于位置
x
1
{\displaystyle x_{1}}
t
1
{\displaystyle t_{1}}
x
2
{\displaystyle x_{2}}
t
2
{\displaystyle t_{2}}
特别地针对这程序,终结状态的固定动作似乎额外地赋予了作用量原理一些目的论 的特色。在物理学史 里,这特色不经意地制造出很多激烈的争论。
参阅
变分法 活力 (物理) (vis viva )高斯最小约束原理 (Gauss' principle of least constraint )赫兹最小曲率原理 (Hertz's principle of least curvature )雅可比原理 (Jacobi's principle ) 参考文献
^ 1.0 1.1 Jourdain, Philip, The principle of least action, Open Court Publishing Company: pp. 1, 54, 1913 ^ Wilson, Alistair Macintosh, The Infinite in the Finite, Oxford University Press: 38, 1995, ISBN 9780198539506 ^ Kline, Morris. Mathematical Thought from Ancient to Modern Times . New York: Oxford University Press. 1972: pp. 167–168. ISBN 0-19-501496-0 ^ 4.0 4.1 4.2 Dugas, R., A History Of Mechanics, New York: Dover Publications, Inc.: pp. 255ff, 274, 345–346, 1988, ISBN 0-486-65632-2 ^ 5.0 5.1 Hecht, Eugene, Optics 4th, United States of America: Addison Wesley: pp. 106–111, 141, 2002, ISBN 0-8053-8566-5(英语) ^ P.L.M. de Maupertuis, Accord de différentes lois de la nature qui avaient jusqu'ici paru incompatibles. 英文翻译 )
^ P.L.M. de Maupertuis, Le lois de mouvement et du repos, déduites d'un principe de métaphysique. 英文翻译 )
^ Euler, Leonhard, Methodus Inveniendi Lineas Curvas Maximi Minive Proprietate Gaudentes , Geneva: Bousquet, Lausanne &, [1744] [2010-07-26 ] , (原始内容存档 于2014-10-22) ^ The MacTutor History of Mathematics网页:O'Connor, J. J.; Robertson, R. F., The Berlin Academy and forgery , [2010-07-26 ] , (原始内容存档 于2016-01-16)
^ Dugas, R., A History Of Mechanics, New York: Dover Publications, Inc.: pp. 255ff, 1988, ISBN 0-486-65632-2 ^ 马赫, 恩斯特 , The science of mechanics; a critical and historical account of its development , Watchmaker Publishing: pp. 364–368, 380, 2010 [1919], ISBN 978-1603863254 ^ Euler, Leonhard, Additamentum II (external link (页面存档备份 ,存于互联网档案馆 )), ibid.(英文翻译 )
^ 13.0 13.1 Lanczos, Cornelius, The Variational Principles of Mechanics, Dovers Publications, Inc: pp. 132–138, 1970, ISBN 978-0-486-65067-8






{kind=link}
{kind=link}
{kind=link}