射影空间
| 此条目没有列出任何参考或来源。 (2019年2月24日) |
数学上,一个射影空间可以被看作是通过向量空间V的原点的直线的集合。V = R2以及V = R3的射影空间分别为实射影直线和实射影平面,其中 R表示实数域,R2表示有序实数对,R3表示实有序三元组。

射影空间的概念与透视投影有关。更确切地说,它与眼睛或照相机把3D场景投影到2D图像的方法有关。所有位于同一条投影直线(即与相机的入射瞳孔相交的"视线")上的点被投影到同一个图像上的点。在这种情况下,向量空间为R3,相机的入射瞳孔位于原点,而射影空间与图像上的点对应。
介绍
{kind=link}
如前文提到的,射影空间是一个把"平行直线相交于无穷远处"的描述进行形式化定义的几何对象。我们以下给出建构实射影平面 P2(R)的细节。如下三种定义等价:
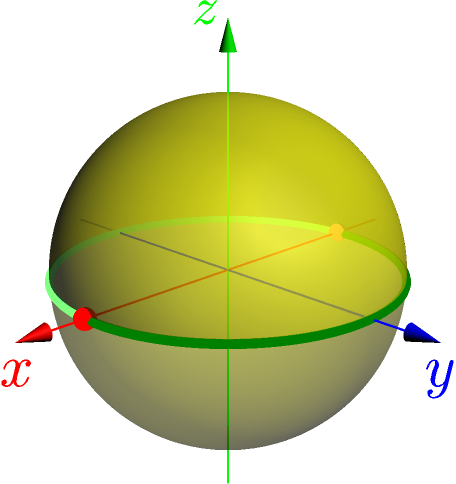
- R3中通过原点(0, 0, 0)的所有直线的集合。每条这样的直线与球心在原点、半径为1的球面恰好在两个点相交,即P = (x, y, z)与其对跖点 (−x, −y, −z)。
- P2(R)也可以被描述为球面S2上的点,其中每个点P与其对跖点不进行区分。例如,点(1, 0, 0) (图中红色点)与点(−1, 0, 0) (浅红色点,因渲染关系颜色偏黄)等同。
- 最后,另一种等价定义是R3 ∖ {(0, 0, 0)}的等价类,即不包含原点的三维空间,其中两个点P = (x, y, z)与P∗ = (x∗, y∗, z∗)等价当且仅当存在非零实数λ使得P = λ⋅P∗,即x = λx∗,y = λy∗,z = λz∗。射影平面的元素的通常写法,即R3中非零点(x, y, z)所对应的等价类,可以写成[x : y : z]。
最后一个公式即为齐次坐标。
在齐次坐标下,任意点[x : y : z] (z ≠ 0)等价于点[x/z : y/z : 1]。因此,射影平面可以分为两个不相交的集合:包含满足z ≠ 0的形如[x : y : z] = [x/z : y/z : 1]的点,以及形如[x : y : 0]的点。 后者可以再被类似地划分为两个不相交子集,即等价于[x/y : 1 : 0]的点集和形如[x : 0 : 0]的点集。在最后一种情况下,x必不为零,因为原点不属于P2(R)。这最后的一个集合即等价于点[1 : 0 : 0]。 从几何上看,第一个子集与R2同构(我们将在后面看到,这不仅仅是集合意义上的同构,也是流形意义上的同构),位于图中黄色的上半球(不包含赤道;等价地也可以说是下半球)。第二个子集则与R1同构,对应于绿色半圆弧(不包含两个标出来的端点;等价地也可以说浅绿色半圆弧)。最后,剩下的即为红色点或与其等价的浅红色点。
射影空间的公理定义
射影空间S可以被定义为满足如下公理的一个集合P(点集合)与一个P的子集的集合L(直线集合):[1]
最后这条公理排除了以下可约的情况:给定一组互不相交的射影空间,对任意位于两个不同的射影空间的点构造包含这两点的线,则这些射影空间的并仍满足前几条公理。更抽象地说,它可以被定义为一个关联结构 (P, L, I),它包括点集P,线集L,以及声明哪些点位于哪些线上的关联关系I。
有限射影空间/平面
{kind=link}
当射影空间的点集P只有有限个点时,该空间被称为有限射影空间。在任意有限射影空间中,每条线均包含相同的点数,于是可以定义空间的阶数为这个(共同的)点数减一。对于三维及以上的有限射影空间,韦德伯恩小定理意味着射影空间所定义在的商环必须是一个有限域,GF(q),其阶数(即元素个数)为q (一个素指数)。
参考资料
- ^ Beutelspacher & Rosenbaum 1998,pgs. 6–7
- ^ 亦被称为维布伦-杨公理或错误地称为帕施公理 (Beutelspacher & Rosenbaum 1998,pgs. 6–7). 帕施公理是关于试图在实射影空间引入序关系,而这并非维布伦-杨公理所关注的。